Configuration avancée de l'analyse pushover
Modifiez les paramètres avancés de l’analyse pushover pour chaque modèle de charge latérale depuis l’option 'Cas de charge', accessible dans le bloc 'Pushover' de la barre d’outils supérieure, sous l’onglet 'Calcul' (section 'Structure').
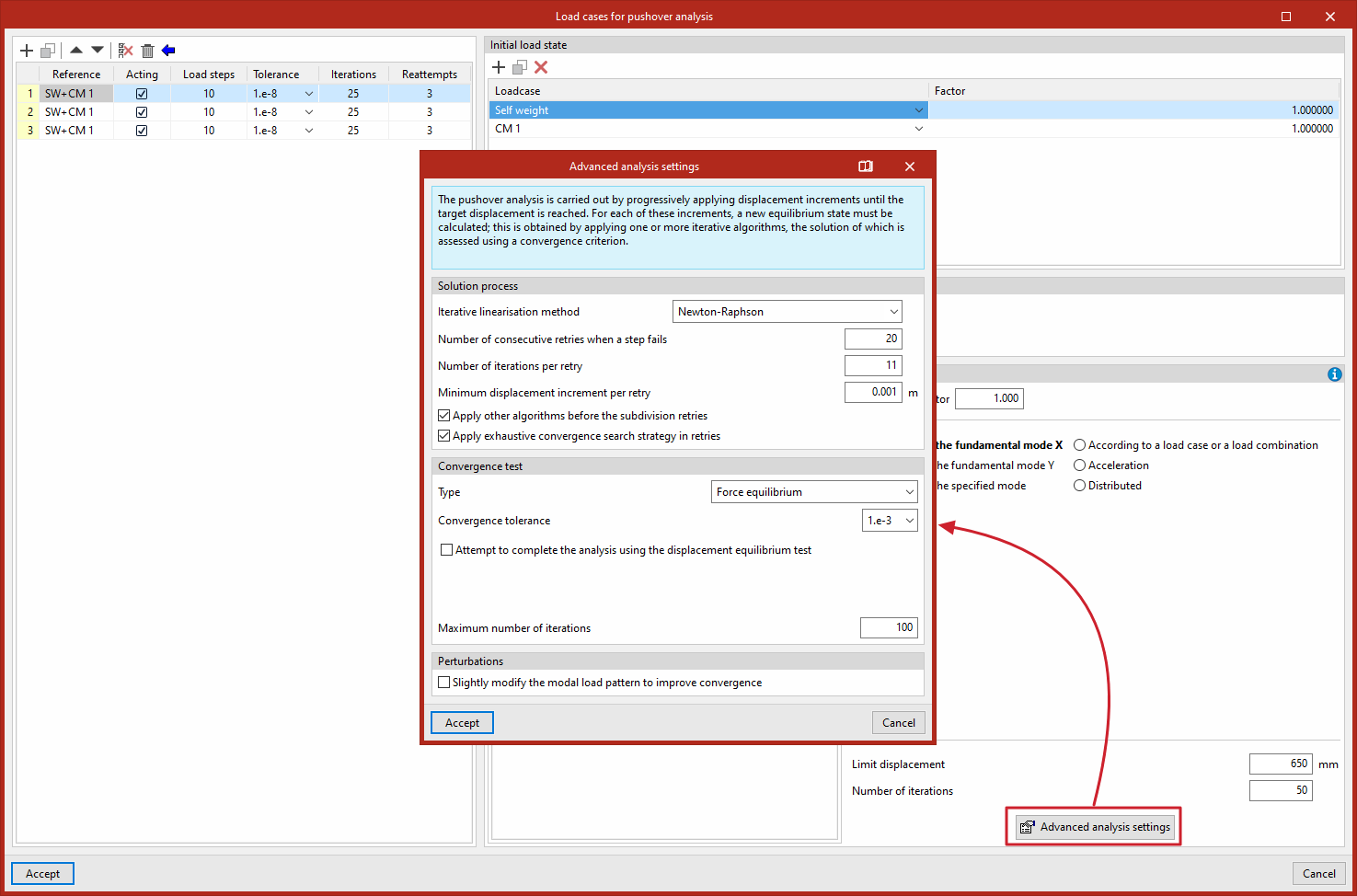
Stratégie de convergence
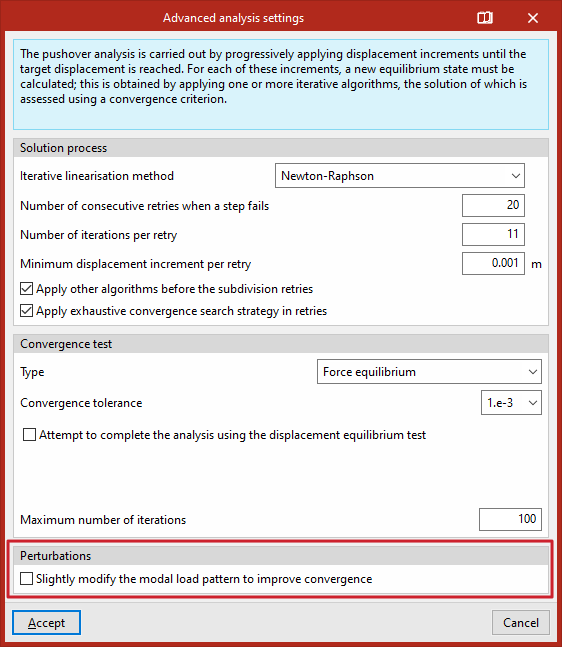
Réalisez l’analyse pushover en appliquant progressivement des incréments de déplacement jusqu’à atteindre le déplacement cible. À chaque incrément, calculez un nouvel état d’équilibre à l’aide d’un ou plusieurs algorithmes itératifs, puis validez la solution avec un critère de convergence.
Le choix de l’algorithme et du test de convergence détermine la trajectoire de convergence. Selon le modèle (ou la direction d’analyse), utilisez des stratégies différentes. Si nécessaire, modifiez la stratégie en cours d’analyse.
L’algorithme d’analyse pushover du logiciel cherche à atteindre le déplacement cible avec la méthode de linéarisation itérative que vous définissez. Si le test de convergence n’est pas satisfait à une étape, le logiciel peut appliquer des méthodes secondaires et/ou réduire la taille de l’incrément.
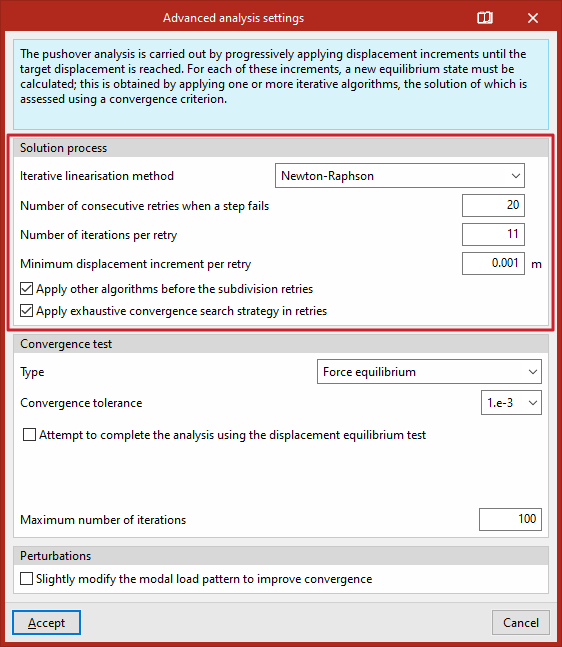
Processus de résolution
Définissez d’abord la 'Méthode itérative de linéarisation'. Cette méthode contrôle la manière dont l’itération progresse au sein d’un pas de charge pour satisfaire la relation d'équilibre R(u) = Fe - Fi(u) = 0.
Méthodes disponibles :
- Newton-Raphson
Recommandée pour les modèles de petite à moyenne taille (< 100 000 degrés de liberté). Méthode la plus conservatrice : elle refactorise la matrice tangente à chaque itération, ce qui réduit l’erreur résiduelle et améliore la précision lorsque la réponse du système est sensible. En contrepartie, elle est plus lente et peut être plus sujette aux oscillations.
- Newton-Raphson modifié
Adaptée aux modèles de grande taille (> 100 000 degrés de liberté). Refactorisation uniquement au début, puis utilisation d’une matrice approchée : méthode plus rapide et plus stable vis-à-vis des oscillations, avec une convergence linéaire.
- Krylov-Newton
Adaptée aux modèles de grande taille (> 100 000 degrés de liberté). Factorisez au début, puis corrigez la direction du déplacement à l’aide des résidus précédents. Méthode robuste lorsque la matrice tangente est mal conditionnée.
- Newton-Raphson (recherche linéaire, pas de 0,5)
- Newton-Raphson (recherche linéaire, facteur 0,8)
Adaptées aux modèles de petite à moyenne taille (< 100 000 degrés de liberté). Fonctionnement identique à Newton-Raphson, avec une recherche le long de la direction de l’incrément de déplacement pour minimiser l’erreur. Utilisez ces options si Newton-Raphson oscille sans converger.
Pour chaque méthode, définissez :
- le 'Nombre de nouvelles tentatives consécutives en cas d’échec d’une étape' ;
- le 'Nombre d’itérations par nouvelle tentative' ;
- l’'Incrément minimal de déplacement par nouvelle tentative'.
Activez également, si nécessaire :
- 'Appliquer d’autres algorithmes avant les nouvelles tentatives par subdivision' ;
- 'Appliquer une stratégie exhaustive de recherche de convergence lors des nouvelles tentatives'.
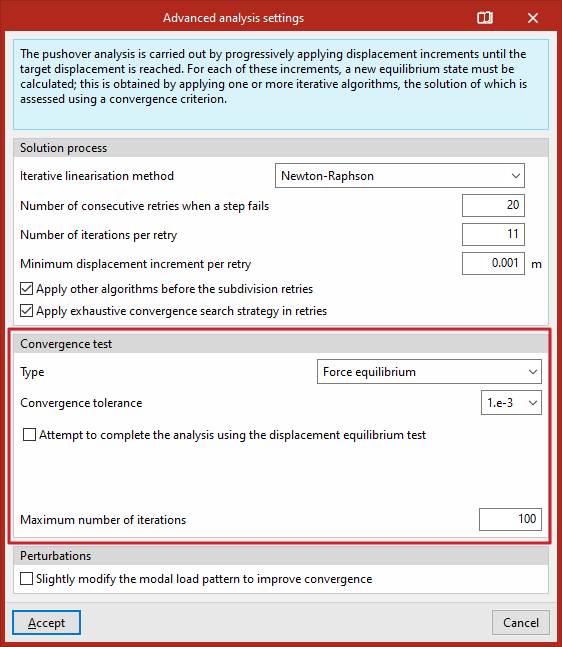
Test de convergence
Le test de convergence évalue la norme euclidienne de l’erreur sur l’ensemble des degrés de liberté. Il permet de vérifier que l’équilibre est atteint dans la tolérance définie.
Dans 'Test de convergence', choisissez le 'Type' :
- Équilibre des forces
Suffisant dans la plupart des cas pour garantir la précision globale. Le logiciel vérifie que l’augmentation des déplacements entre itérations est inférieure à la tolérance. Une tolérance unique s’applique aux déplacements et aux rotations (unités internes : mètres et radians).- Si nécessaire, activez 'Essayer de finaliser l’analyse en utilisant le test d’équilibre des déplacements', puis définissez 'Tolérance de convergence (déplacements)' et le 'Facteur de subdivision du pas'.
- Équilibre des déplacements
Le logiciel vérifie que le résidu d’efforts entre itérations est inférieur à la tolérance (unités internes : tonnes). Utilisez ce test si l’équilibre des déplacements est atteint avant l’équilibre des forces, ce qui peut se traduire par une courbe déplacement–effort tranchant irrégulière et de fortes variations des efforts et moments.- Définissez la 'Tolérance de convergence'.
- Équilibre des forces et des déplacements
Le logiciel impose simultanément les deux équilibres. Les résultats sont les plus précis, mais la convergence jusqu’au déplacement cible peut devenir plus difficile.- Définissez 'Tolérance de convergence (forces)' et 'Tolérance de convergence (déplacements)'.
- Équilibre des forces ou des déplacements
Le logiciel valide la convergence si l’un des deux équilibres est satisfait. Utilisez cette option uniquement pour diagnostiquer des problèmes de convergence.- Définissez 'Tolérance de convergence (forces)' et 'Tolérance de convergence (déplacements)'.
- Équilibre de l'énergie
Utilisez cette option en dernier recours. Le logiciel vérifie que l’augmentation d’énergie entre itérations est inférieure à la tolérance (unités : tonnes-mètres). Selon certains modes de déformation, ce test peut indiquer un faux équilibre (si le vecteur d’incréments de déplacement est orthogonal au vecteur des résidus).- Définissez la 'Tolérance de convergence'. Si nécessaire, activez 'Essayer de finaliser l’analyse en utilisant le test d’équilibre des déplacements', puis définissez 'Tolérance de convergence (déplacements)' et le 'Facteur de subdivision du pas'.
Pour chaque type de test, définissez également le 'Nombre maximal d’itérations'.
Perturbations
Dans 'Perturbations', activez 'Modifier légèrement le schéma de chargement modal afin d’améliorer la convergence' si la convergence est difficile.